发布时间:2025-10-10
发布时间:2025-10-10 作者:Dennis
作者:Dennis 浏览量:
浏览量:西湖大学工学院赵世钰课题组在多无人机协同操作领域的研究成果:“Proximal cooperative aerial manipulation with vertically stacked drones”于2025年9月24日正式发表在《Nature》期刊。该研究首次实现了多架无人机在强下洗气流干扰下的垂直堆叠飞行与亚厘米级精准工具交换,标志着我国在多旋翼无人机协同控制领域取得重大突破!

研究背景
当前,空中作业机器人主要面临单体作业能力有限的技术瓶颈。传统无人机多用于航拍、监测等被动观察任务,而结合高自由度机械臂的空中作业机器人虽能实现主动操作,但受限于负载能力,单机难以完成复杂作业任务。研究团队提出多无人机协同作业新范式,类似现代外科手术中“主刀医生-器械护士"的协作模式,通过工具交换与任务分工实现复杂作业能力。
研究概述
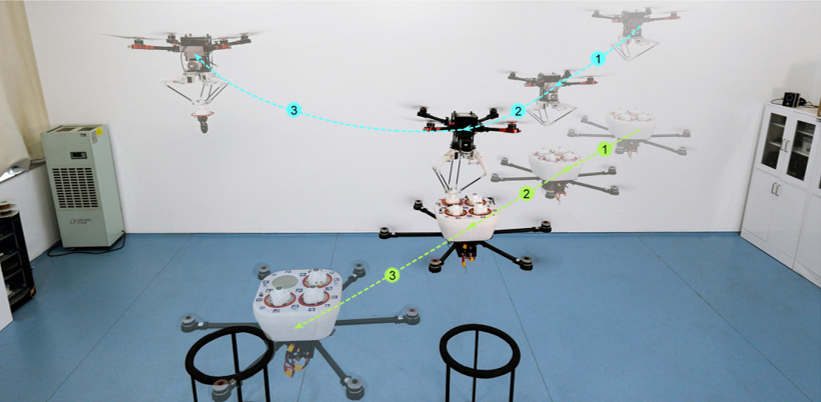
该研究开发了FlyingToolbox协同空中操作系统,核心解决了垂直堆叠构型中的气动干扰难题:当两架无人机垂直距离为0.6米时,实测下洗气流速度达13.18米/秒(6级强风量级),而系统需在此条件下保持末端执行器与工具接口的水平位移误差小于1.5厘米。这一突破为多无人机近距协同操作奠定了技术基础。
研究方法
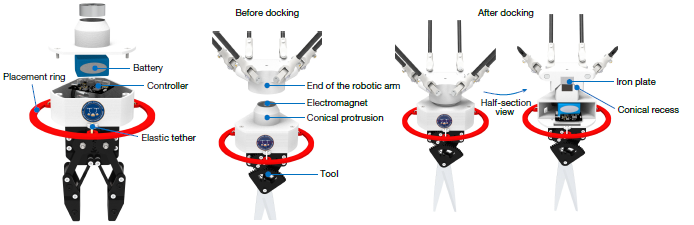
柔性电磁对接机构设计—采用创新的电磁智能接口方案:在操作无人机机械臂末端设置含铁片的锥形空腔装置,工具箱无人机顶部安装电磁铁锥体。对接过程中,电磁铁通电产生定向磁场,与铁质材料形成有效吸附,实现工具快速连接与分离。
气流扰动建模与补偿—基于流体力学基本原理与实验数据,建立了精确的下洗气流速度场模型。该模型将理论分析与实测速度数据相结合,利用神经网络实时估计气动干扰力矩,为控制补偿提供依据。
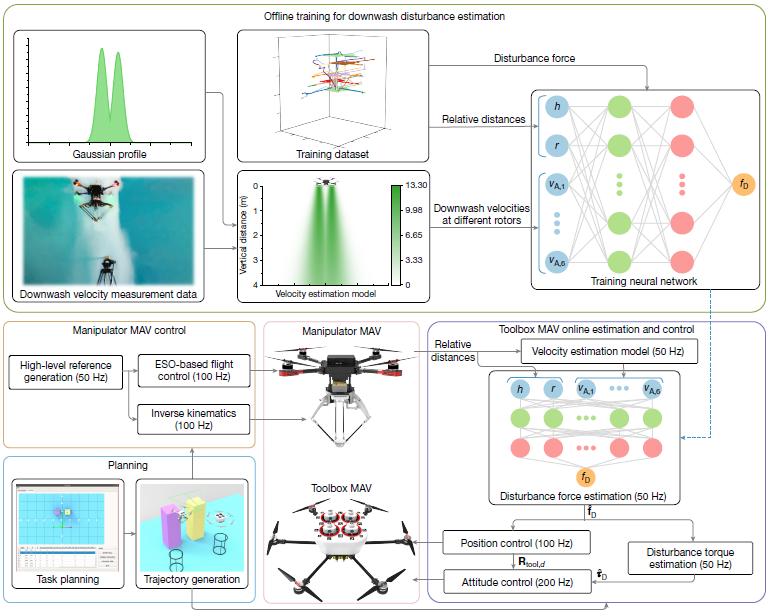
高精度运动控制—该研究设计了一款自适应控制器,能够实时调整六旋翼无人机的电机转速,有效抵消时变气动干扰。控制系统采样频率达100Hz,确保动态响应性能。
研究结果
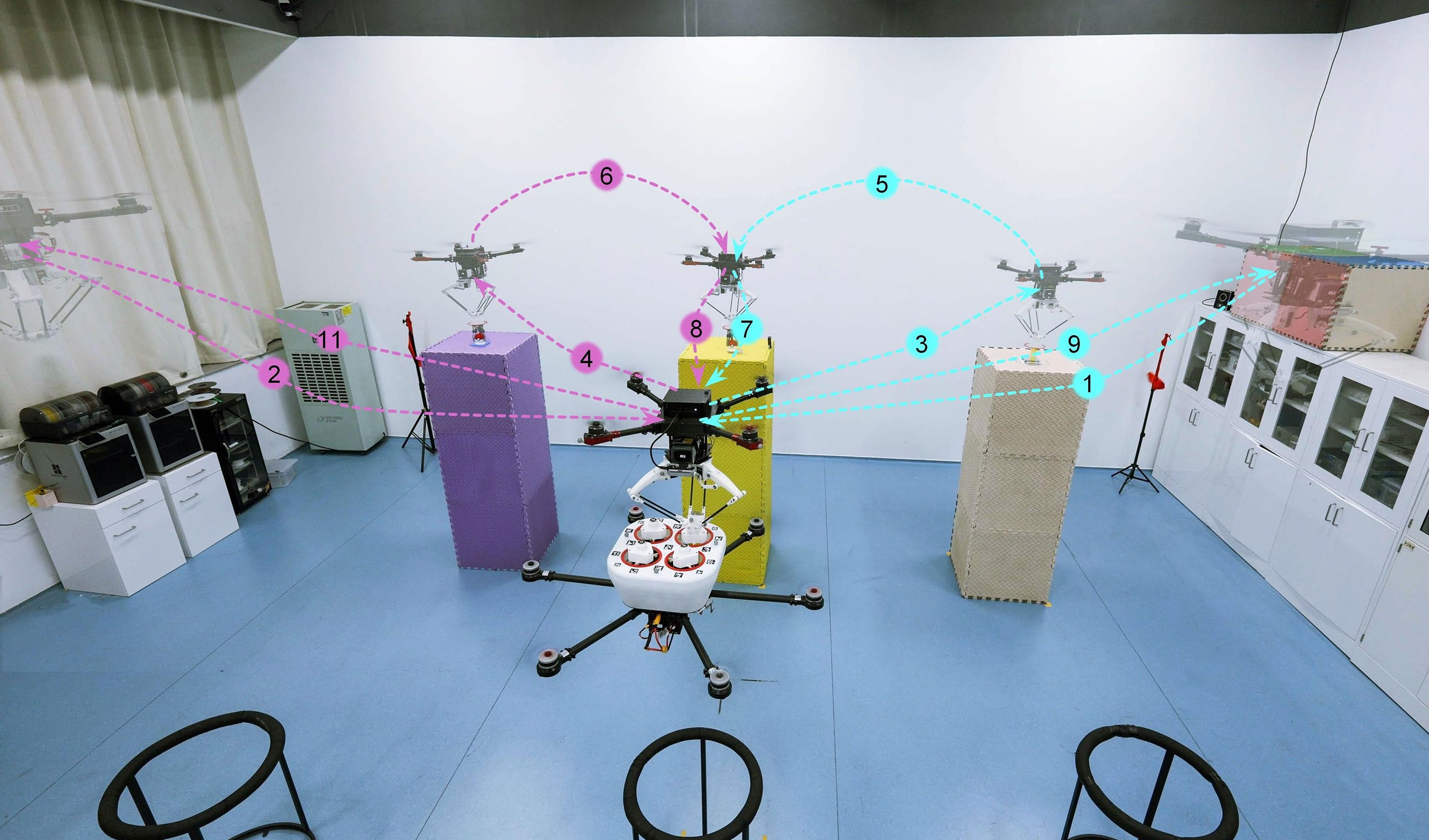
系统性能评估表明,FlyingToolbox系统在连续20次对接实验中表现出优异的稳定性和精度,平均对接误差控制在0.80±0.33厘米,最大误差不超过1.3厘米,实现了亚厘米级的精准对接,相较于无气流补偿的传统方法精度提升近一个数量级;在功能验证方面,系统成功完成了包括空中剪切、物体抓取和精准放置在内的双机协同作业任务,全过程基于机载计算资源自主实现,并在更具挑战性的三机协同实验中,系统在高度动态的多源气流干扰环境下仍保持稳定作业能力,同时通过了动态对接测试,验证了对运动平台上工具抓取的适应能力;鲁棒性测试进一步证实,系统在不同初始条件和外部扰动等多组实验环境中均表现出良好的重复性与稳定性,充分验证了所提方法的工程实用性和可靠性,为多无人机近距协同操作的实际应用奠定了坚实的技术基础。

研究意义
该研究突破了多无人机强耦合协同操作的技术瓶颈,构建了气动干扰建模与补偿的理论体系,为空中机器人协同作业提供了创新范式。研发的模块化FlyingToolbox系统具备平台化扩展能力,为无人机从单平台作业向群体智能协同演进奠定了技术基础。该成果在高危环境作业、城市空中交通保障等领域具有重要应用前景,将推动低空经济与具身智能的深度融合,为智能无人系统产业链创新发展开辟了新方向。原文链接:https://www.nature.com/articles/s41586-025-09575-x声明:本文内容基于公开资料整理,如涉及版权问题,请联系我们删除。
扶光观察
西湖大学团队发表的文献图片中,Vicon高精度运动捕捉系统作为关键实验工具清晰呈现,印证了其在无人机协同研究中的实际应用价值。该系统凭借亚毫米级空间定位精度,为验证新型算法和控制策略提供可靠的"测量真值",直接支撑了无人机近距协同操作等前沿领域的突破性进展。这一技术细节凸显了高精度测量对科研创新的核心支撑作用。扶光合拓深耕高精度运动捕捉领域,持续为科研机构提供专业设备与定制化解决方案,助力实验数据的精准采集与高效分析!
如需了解相关产品信息、获取更多详情,您可关注我们的微信公众号并留言咨询,或访问公司官网www.newbiolab.com.cn进行查询;也可致电010-80201918直接联系我们。



 关注公众号
关注公众号