发布时间:2026-05-28
发布时间:2026-05-28 作者:小编
作者:小编 浏览量:
浏览量:在动作采集、动态仿真、人机交互等诸多技术领域中,传统动作采集方式存在着诸多使用局限。以往多数采集模式需要依托实体标记物辅助捕捉,不仅操作流程繁琐,还会对采集对象的动作状态造成一定干扰。无标记动作捕捉技术的出现,彻底打破了传统采集模式的桎梏,依托纯视觉、算法识别的采集逻辑,无需依附任何外部标记设备,即可精准捕捉人体或物体的动态轨迹。而非接触式动作采集系统基于无标记捕捉技术搭建,进一步优化了采集流程、拓宽了适用场景,成为当下动态采集领域实用性较强的技术方案。本文将深度拆解无标记捕捉的实现逻辑,对比传统采集方式的短板,详细阐述非接触式动作采集系统的便捷性与应用价值。

1.1 无标记捕捉的基础定义
1.1.1 技术核心内涵
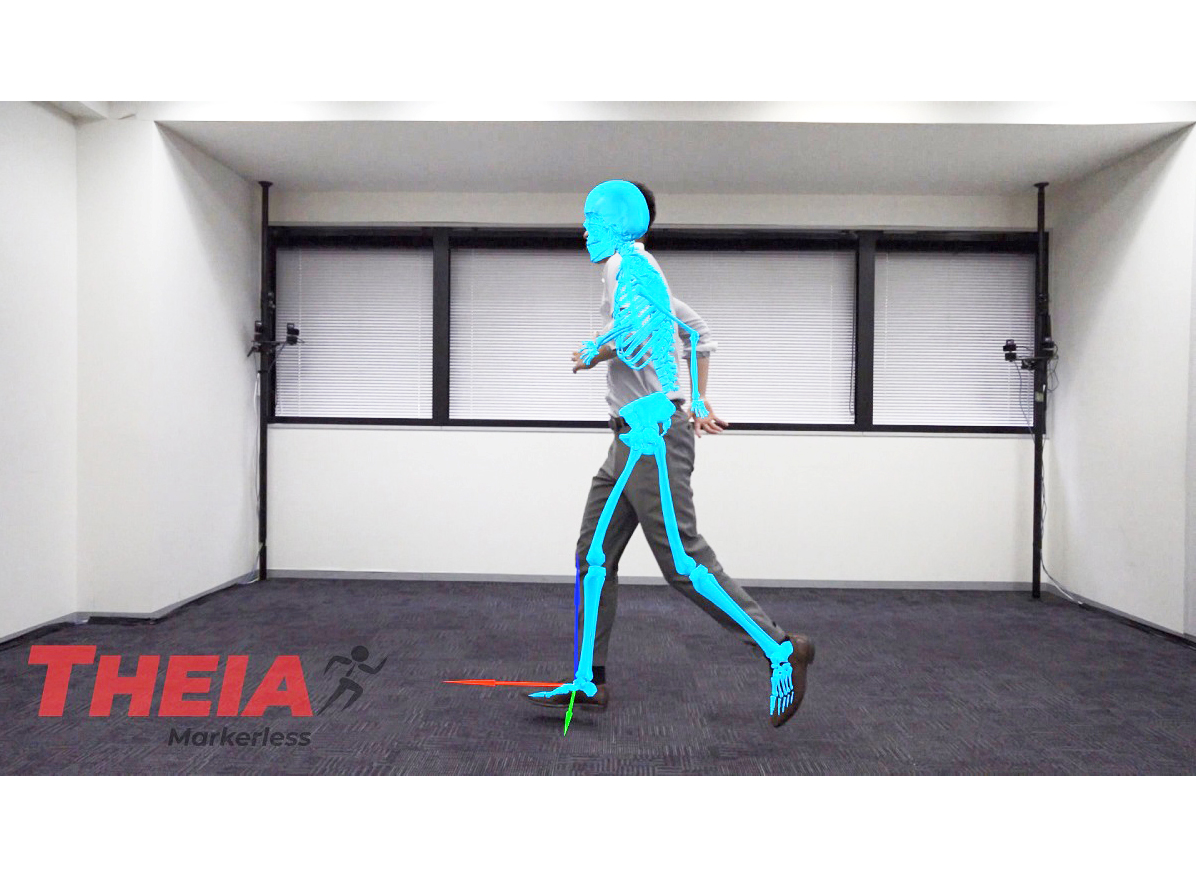
无标记捕捉是一种全新的动态信息采集技术,区别于传统有标记捕捉模式,该技术无需在采集对象身体或物体表面粘贴、绑定任何反光点、传感器、标记球等辅助设备。其核心逻辑是依托视觉感知设备与智能算法,直接对采集对象的外观形态、肢体轮廓、运动姿态进行实时识别与追踪,自动提取关键运动节点与动态数据,完成全方位的动作信息采集与还原。
该技术的核心突破在于摆脱了物理标记的依赖,将动作采集的核心载体从“硬件标记识别”转变为“视觉智能识别”,让动作采集过程不再受外接设备的约束,最大程度还原采集对象最自然、最真实的运动状态。
1.1.2 技术应用特性
无标记捕捉技术具备适配性强、无干扰、轻量化采集的核心特性。在采集过程中,不会对采集对象的肢体活动、形态表现产生外力限制,无论是人体肢体运动、面部微表情变化,还是柔性物体、不规则物体的动态变化,都能完成有效捕捉。同时,该技术可适配静态姿态采集与动态连续运动采集,能够满足不同场景下的基础数据采集需求。
1.2 无标记捕捉与传统捕捉的核心区别
1.2.1 传统有标记捕捉的短板
传统动作捕捉技术普遍采用有标记采集模式,需要提前在采集对象的关键关节、轮廓点位粘贴专属标记配件。整个采集前期需要耗费大量时间完成标记点位规划、粘贴、校准工作,准备流程冗长。在采集过程中,标记配件容易因肢体运动出现移位、脱落、遮挡等问题,直接影响采集数据的完整性。
除此之外,外接标记设备会对采集对象造成一定的束缚感,人体采集过程中,穿戴的标记配件、传感设备会限制肢体的大幅度舒展运动,导致采集的动作数据与真实自然状态存在偏差。对于儿童、老人、柔性穿戴场景等特殊采集对象与场景,传统标记式采集的适配性会大幅下降。
1.2.2 无标记捕捉的核心优势
无标记捕捉从根源上解决了传统采集模式的各类问题,无需前期标记布置、设备穿戴等繁琐准备工作,大幅简化采集前置流程。采集过程中无任何外接设备干扰,采集对象可自由完成各类动作,有效保障动作数据的真实性与完整性。同时,该技术不受标记点位数量、位置的限制,能够全方位捕捉细微动作变化,动态还原精度更高,适配的采集场景也更为广泛。
2.1 无标记捕捉的核心技术支撑
2.1.1 机器视觉感知技术
机器视觉是无标记捕捉的基础核心技术,主要依托高清视觉采集设备、深度感知设备完成场景与对象的信息采集。不同于普通摄像拍摄,视觉感知设备可精准捕捉画面中的深度信息、轮廓信息、空间位置信息,能够区分采集对象与背景环境的边界,过滤场景中的无效干扰元素,为后续动作分析提供精准的原始画面数据。
多视角视觉采集是该技术的关键应用方式,通过多维度布设感知设备,可实现对采集对象的360度无死角拍摄,避免单一视角出现动作遮挡、画面缺失的问题,保障动态采集的全面性。
2.1.2 人工智能图像算法技术
人工智能图像算法是实现无标记动作解析的核心核心,主要包含图像分割、姿态估计、轨迹追踪、三维重建四大核心算法模块。图像分割算法可自动从复杂背景中剥离出采集对象,精准锁定目标主体;姿态估计算法能够识别采集对象的关键节点,针对人体可精准定位关节、骨骼、肢体轮廓等核心点位。
轨迹追踪算法可实时记录各关键节点的运动方向、位移变化、运动速度,持续追踪动态变化过程;三维重建算法则能将二维画面信息转化为三维立体动态模型,完整还原采集对象的空间运动姿态,实现从画面采集到数据建模的完整转化。
2.1.3 三维空间定位技术
三维空间定位技术为无标记捕捉提供空间坐标支撑,通过建立虚拟三维空间坐标系,将视觉采集到的所有动作节点纳入坐标体系中。每一个肢体点位、运动轨迹都对应专属的空间坐标信息,通过实时更新坐标数据,精准记录动作的幅度、角度、位移变化,让无标记捕捉摆脱平面画面的局限,实现立体空间的动态精准采集。
2.2 无标记捕捉的具体实现流程
2.2.1 前期场景与设备校准
无标记捕捉的前期准备流程极为简便,无需针对采集对象做任何设备穿戴与标记处理,仅需完成场景环境调试与采集设备校准即可。首先优化采集场景环境,保障光线均匀、无强光反光、无大面积遮挡物,减少环境对视觉采集的干扰。随后启动感知设备,完成设备焦距、采集范围、空间坐标的统一校准,搭建稳定的三维采集空间,整个准备过程耗时短、操作简单。
2.2.2 实时视觉画面采集
设备校准完成后,即可启动实时采集工作。多维度布设的视觉感知设备会同步开启画面捕捉,持续采集采集对象的运动画面,同步收录画面中的深度、轮廓、色彩等多维信息。整个采集过程无需人工干预,设备可自动适配采集对象的运动范围,实时捕捉各类动态变化,无论是慢速细微动作还是快速大幅度运动,都能完成稳定的画面采集。
2.2.3 智能算法解析与点位识别
采集到的原始画面数据会实时传输至系统算法终端,首先通过图像分割技术剔除背景杂物、光影干扰等无效信息,精准锁定采集主体。随后姿态估计算法会自动扫描主体轮廓,标记人体骨骼关节、肢体端点等关键动作点位,生成虚拟动态节点。相较于传统人工标记点位,算法识别的虚拟点位更加规范、精准,且不会出现移位、脱落问题。
2.2.4 动态轨迹追踪与三维建模
在关键点位识别完成后,系统会通过轨迹追踪算法,实时监测各虚拟点位的空间坐标变化,持续记录肢体的运动角度、摆动幅度、位移路径等动态信息,形成连续的运动轨迹。同时依托三维重建技术,将二维画面中的动态信息转化为三维立体动态模型,完整还原采集对象的整体运动姿态,实现从画面采集到动态建模的完整转化。
2.2.5 数据优化与结果输出
初步生成的动态模型与数据会经过系统后台的优化处理,自动修正轻微画面误差、节点偏移问题,过滤无效冗余数据,保障采集结果的稳定性与准确性。优化完成后,系统可根据需求输出动态模型、运动数据、姿态分析结果等多形式内容,满足后续仿真、分析、复刻、研发等各类使用需求。
3.1 操作流程轻量化,降低使用门槛
3.1.1 精简前置准备工作
非接触式动作采集系统依托无标记捕捉技术搭建,彻底摒弃了传统采集模式繁琐的前置准备流程。传统采集需要工作人员逐一完成标记点位测量、粘贴、固定,同时需要调试穿戴传感设备,整个过程需要耗费大量人力与时间成本。而该系统无需对采集对象进行任何改造处理,人员、设备、物体均可直接进入采集场景,仅需简单调试设备状态即可启动采集工作,极大提升了采集工作的效率。
3.1.2 简化操作运维难度
该系统的整体操作逻辑简洁直观,无需操作人员具备专业的传感调试、标记校准技术,经过简单培训即可独立完成设备启动、场景调试、数据采集、结果导出等全流程操作。同时,系统具备自动纠错、自动适配场景的能力,运行过程中无需人工实时值守调整,大幅降低了运维难度与人工成本,适配普通工作人员日常操作使用。
3.2 采集过程无干扰,提升数据质量
3.2.1 无物理束缚还原真实状态
非接触式采集模式最大的特点就是全程无接触、无束缚,采集对象无需穿戴任何设备、粘贴任何标记,肢体与形态活动不受任何外力限制。在人体动作采集过程中,采集者可以自然完成行走、跳跃、旋转、屈伸等各类动作,不会因设备束缚出现动作僵硬、幅度受限的情况,能够最大程度还原人体自然运动状态,保障采集数据的真实性。
3.2.2 规避设备故障导致的数据异常
传统标记式采集过程中,标记脱落、点位遮挡、传感设备失灵等问题频发,容易导致局部动作数据缺失、轨迹断裂,需要反复重新采集,不仅影响工作效率,还会造成数据误差。非接触式系统依托纯视觉算法采集,不存在物理设备故障问题,只要保障基础采集环境稳定,即可实现连续稳定的动作捕捉,有效规避各类数据异常问题,提升采集结果的完整性与稳定性。
3.3 场景适配性广泛,灵活度更高
3.3.1 适配多元采集对象
非接触式动作采集系统的适配范围极为广泛,可覆盖各类采集对象。在人体采集方面,可适配不同年龄、不同体型的采集者,无论是成人、儿童还是特殊肢体活动人群,都可完成无差别采集,同时支持全身动作、面部微表情、手部精细动作等不同维度的捕捉。除人体之外,还可适配机械结构、柔性物料、不规则设备物体的动态采集,满足多领域的采集需求。
3.3.2 适配各类应用场景
该系统可灵活适配室内外各类采集场景,既能满足实验室、工作室、研发车间等固定室内场景的精准采集需求,也可适配户外动态场景、实景作业场景的移动式采集。同时,可适配静态姿态采集、低速动态采集、高速连续运动采集等不同采集模式,能够覆盖影视动画制作、人机交互研发、运动科学研究、工业动态仿真、医疗康复评估等多个领域的使用场景。
3.4 后期处理高效,实用性更强
3.4.1 数据实时同步输出
非接触式动作采集系统支持采集过程与数据输出同步进行,实时捕捉动态动作的同时,同步完成数据解析、建模与存储,无需采集完成后进行冗长的数据导入、转换工作。工作人员可实时查看采集动态模型与数据结果,及时发现采集过程中的环境问题或动作问题,随时调整采集方案,大幅提升工作效率。
3.4.2 兼容多类型后期应用
系统输出的动态模型与数据格式具备良好的兼容性,可直接对接各类三维建模软件、仿真分析软件、动画制作软件,无需进行复杂的格式转换与数据适配。后期可直接依托采集成果完成动作复刻、模型优化、数据分析、仿真测试等工作,大幅简化后期处理流程,提升整体工作的连贯性与实用性。
4.1 降低行业应用成本
从长期应用角度来看,非接触式动作采集系统无需频繁更换标记配件、维护传感穿戴设备,大幅减少了硬件耗材的投入成本。同时,精简的操作流程减少了人工值守、反复采集的人力成本,高效的采集模式也缩短了项目研发、数据采集的周期成本,为各行业轻量化开展动态采集工作提供了低成本解决方案。
4.2 提升动态采集行业效率
传统动作采集模式受流程繁琐、故障频发、数据误差等问题影响,整体工作效率偏低。无标记捕捉技术与非接触式系统的结合,实现了采集流程简化、采集过程稳定、数据精准度提升、后期处理高效的全方位升级,让动态采集工作从前期准备、中期捕捉到后期应用形成完整高效的闭环,大幅提升了全行业动态采集的整体工作效率。
4.3 拓展技术应用边界
传统有标记采集模式受场景、对象、设备的限制,诸多特殊场景无法开展采集工作。而非接触式无标记捕捉技术突破了传统技术的应用局限,可适配精细化微动作采集、大范围动态场景采集、特殊人群与特殊物体采集等各类复杂场景,进一步拓展了动作采集技术的应用边界,为各领域的技术研发、创新应用提供了更多可能性。
5.1 环境适配能力持续优化
当前无标记捕捉与非接触式采集技术已能适配多数常规场景,未来技术将持续优化复杂环境下的采集能力,针对强光、弱光、复杂背景、多干扰场景进行算法升级,提升系统的环境抗干扰能力,实现全场景、全环境的稳定精准采集,进一步提升技术的通用性。
5.2 精细化捕捉精度提升
随着各行业对动态数据精度的需求不断提升,未来技术将聚焦细微动作、微表情、柔性形变等精细化动态捕捉优化,通过升级人工智能算法、优化视觉感知精度,实现更细微、更精准的动态数据采集,满足高端研发、精密仿真、精准医疗等领域的高精度使用需求。
5.3 智能化集成程度升级
未来非接触式动作采集系统将朝着更高智能化方向发展,集成自动场景识别、智能动作分类、数据自动分析、异常数据智能预警等功能,进一步减少人工干预环节,实现采集、分析、输出、应用的全流程智能化运作,持续提升系统的便捷性与实用性。
结语
无标记捕捉技术依托机器视觉、人工智能算法、三维空间定位等多重技术支撑,打破了传统动作采集依赖物理标记的固有模式,通过标准化的视觉采集、算法解析、建模输出流程,实现了无束缚、无干扰、高精度的动态动作捕捉。而基于该技术搭建的非接触式动作采集系统,凭借流程轻量化、采集无干扰、场景适配广、后期效率高的多重优势,彻底解决了传统采集模式的各类痛点。
相较于传统采集方式,非接触式动作采集系统不仅大幅降低了人力与时间成本,提升了动作数据采集的真实性与完整性,还极大拓宽了动作采集技术的应用场景与行业价值。随着人工智能与视觉技术的持续迭代升级,无标记捕捉技术将不断优化完善,非接触式采集系统的智能化、精准化、通用化水平会持续提升,未来将深度赋能更多行业的动态采集、仿真研发、智能交互工作,成为动态感知领域的主流应用方案。



 关注公众号
关注公众号