发布时间:2026-03-09
发布时间:2026-03-09 作者:小编
作者:小编 浏览量:
浏览量:三维动作捕捉是将真实世界中人体、物体的运动轨迹、姿态变化转化为数字空间可识别、可复用、可驱动数据的核心技术,它打通了物理运动与数字呈现之间的壁垒,成为影视动画、游戏制作、虚拟现实、体育科研、医疗康复、工业仿真等领域的基础支撑能力。从大型场景的全身动作采集,到精细的手指、面部表情捕捉,再到小型物体的运动轨迹记录,三维动作捕捉以不同技术路径、不同精度等级,满足着多样化的数字内容创作与科学研究需求。
本文将从技术本质、核心原理、主流技术路线、完整工作流程、关键技术难点、典型应用场景、未来发展趋势等维度,对三维动作捕捉进行全面解析,帮助读者系统理解这项技术从物理信号到数字动画的完整实现逻辑,掌握其技术框架与实践要点。
1.1 技术定义与基本概念
三维动作捕捉,是通过专用硬件设备与软件算法,对目标对象在三维空间内的位置、位移、旋转、速度、加速度、关节角度等六自由度运动信息进行采集、记录、解算、处理,并最终转化为数字模型可驱动的骨骼动画或运动参数的技术体系。
与传统二维视频仅能记录平面运动轨迹不同,三维动作捕捉能够还原运动对象的深度信息、空间关系与姿态细节,实现运动过程的数字化复刻,让真实动作精准映射到虚拟角色、机械结构或分析模型上。
1.2 核心技术逻辑
三维动作捕捉的完整技术链路可概括为物理信号采集→数字信号转换→数据解算处理→运动重建映射→应用输出五个环节,其本质是运动信息的跨维度转译:
1. 将非结构化的物理运动,转化为结构化的坐标、角度、姿态数据;
2. 消除环境噪声、设备误差、遮挡缺失等干扰,保证数据有效性;
3. 结合人体运动学、物体力学规则,让数字运动符合物理规律;
4. 输出可直接用于动画、仿真、分析的标准化数据格式。
1.3 技术核心价值
1. 提升运动还原度:捕捉肉眼难以分辨的细微动作、肌肉发力节奏、关节旋转角度,避免人工动画的僵硬感,让数字运动更贴近真实;
2. 提高内容生产效率:缩短复杂动作、长序列运动的制作周期,降低人工关键帧动画的工作量,适配大规模数字内容生产需求;
3. 拓展应用边界:为虚拟交互、运动分析、康复评估、工业测试提供量化数据支撑,实现从视觉呈现到科学分析的延伸;
4. 降低实践成本:在虚拟环境中完成高风险、高成本、高难度的运动测试与内容创作,减少现实场景的资源消耗与安全风险。
2.1 空间定位原理
三维动作捕捉的基础是三维空间坐标定位,即确定目标点在统一坐标系中的(X,Y,Z)位置。主流定位原理包括:
1. 三角测量原理:通过两个及以上已知位置的采集设备,对同一目标点进行观测,利用设备间距、观测角度构建三角形,通过几何关系计算目标点空间坐标,是光学动捕的核心原理;
2. 惯性推算原理:通过加速度计采集线性加速度,陀螺仪采集角速度,结合时间积分推算位移与姿态,是惯性动捕的核心原理;
3. 磁场感应原理:通过发射固定磁场,利用传感器感应磁场强度与方向变化,确定传感器相对位置,是早期电磁动捕的核心原理;
4. 视觉特征匹配原理:通过深度学习算法识别人体关节、骨骼轮廓等视觉特征,在多视角图像中匹配对应特征点,反推三维坐标,是无标记动捕的核心原理。
2.2 人体运动学基础
人体动作捕捉依赖人体骨骼运动学模型,核心规则包括:
1. 骨骼层级关系:人体运动以骨骼为刚性连杆,关节为旋转枢纽,遵循近端带动远端的运动规律;
2. 关节自由度约束:不同关节具有固定的旋转范围与运动方向,如膝关节主要为屈伸运动,肩关节为多方向旋转运动;
3. 运动连贯性:人体动作是连续的时空序列,相邻帧之间的运动变化符合物理惯性,无突变、无穿越;
4. 逆向运动学(IK)与正向运动学(FK):正向运动学由关节旋转推算末端位置,逆向运动学由末端位置反推关节旋转角度,是动作解算的核心算法基础。
2.3 数据同步原理
高精度动作捕捉依赖时间同步与空间同步:
1. 时间同步:多台采集设备(相机、传感器)在同一时间基准下采集数据,保证同一时刻的运动信息对齐;
2. 空间同步:所有采集设备统一到同一世界坐标系,消除设备位置偏差带来的坐标误差;
3. 采样率匹配:采集设备以固定帧率(如120fps、240fps)采样,保证运动数据的时间密度均匀,避免动作卡顿或丢帧。
目前行业内主流的动作捕捉技术分为光学式、惯性式、无标记视觉式、机械式、声学式、电磁式六大类,其中光学式、惯性式、无标记视觉式应用范围最广,机械式、声学式、电磁式因局限性逐步被替代。
3.1 光学式动作捕捉
光学式是目前精度较高、应用成熟的技术路线,通过视觉成像实现运动采集。
3.1.1 核心原理
在捕捉空间内布置多台高速红外相机,对目标对象身上的标记点进行同步拍摄,利用三角测量原理计算每一帧标记点的三维坐标,再通过算法拼接为完整骨骼运动数据。
3.1.2 技术分类
1. 被动式光学动捕:相机发射红外光,目标佩戴反光标记点,标记点反射红外光被相机接收,成本适中、标记点小巧,是专业领域主流方案;
2. 主动式光学动捕:标记点内置LED发光元件,主动发射红外信号,抗环境光干扰能力更强,标记点可编码识别,适合多人同时捕捉;
3. 激光式光学动捕:通过激光扫描空间,感应目标上的接收器位置,定位精度稳定,适合大范围空间捕捉。
3.1.3 系统组成
高速红外相机、标定工具、反光/主动标记点、数据采集主机、解算软件、捕捉服装。
3.1.4 优势与局限
优势:定位精度可达亚毫米级,采样率高,数据稳定,无信号漂移,适合高精度科研与影视制作;
局限:对捕捉空间有要求,易受肢体遮挡、强环境光干扰,设备部署与标定流程复杂,成本较高。
3.2 惯性式动作捕捉
惯性式是便携性较强的无线动捕技术,基于微机电系统(MEMS)实现。
3.2.1 核心原理
在人体关键关节佩戴惯性测量单元(IMU),传感器内置加速度计、陀螺仪、磁力计,分别采集线性加速度、角速度、磁场方向,通过算法融合推算肢体姿态与相对位置,结合骨骼模型还原全身动作。
3.2.2 系统组成
惯性传感器节点、数据传输模块、无线接收器、标定工具、解算软件、穿戴支架。
3.2.3 优势与局限
优势:无需固定空间,不受遮挡影响,便携可移动,部署快速,适合户外、现场等灵活场景;
局限:长时间使用会产生姿态漂移,绝对位置精度低于光学式,磁力计易受金属、电磁环境干扰。
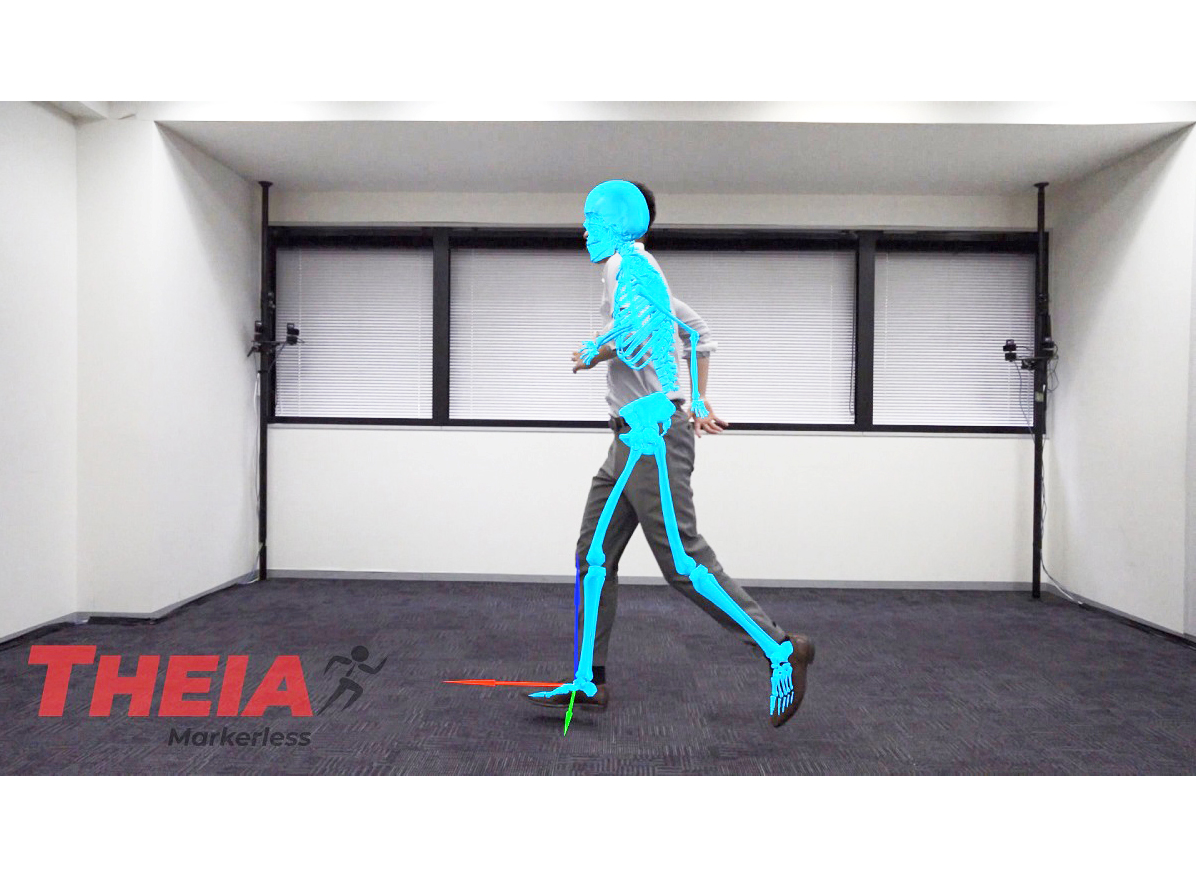
3.3 无标记视觉式动作捕捉
无标记视觉式是近年快速发展的纯视觉方案,无需佩戴专用设备。
3.3.1 核心原理
通过单目或多目普通相机拍摄运动画面,基于深度学习人体姿态估计算法,自动识别图像中的人体关节关键点,在多视角下匹配特征并重建三维运动,无需在目标身上粘贴标记点或佩戴传感器。
3.3.2 技术分类
1. 单目无标记动捕:单台相机采集,算法通过人体模型约束重建三维姿态,成本低、部署简单;
2. 多目无标记动捕:多台相机同步采集,提升空间定位精度与抗遮挡能力,接近光学动捕效果;
3. 实时推理动捕:依托高性能算力实现实时姿态解算,适配虚拟直播、实时交互场景。
3.3.3 优势与局限
优势:目标无穿戴负担,使用门槛低,场景适应性强,适合消费级、轻量化应用;
局限:精度低于光学与惯性方案,复杂动作、肢体重叠时识别准确率下降,对算力与算法依赖度高。
3.4 其他辅助动捕技术
1. 机械式动作捕捉:通过机械连杆、角度传感器连接人体,直接测量关节旋转角度,精度稳定但灵活性差,限制肢体运动范围;
2. 声学式动作捕捉:通过超声发射器与接收器测量距离实现定位,易受声音反射、噪声干扰,精度较低;
3. 电磁式动作捕捉:通过磁场感应位置与姿态,易受金属环境干扰,捕捉范围小,目前仅用于特定科研场景。
一套标准的三维动作捕捉项目,包含前期准备、系统标定、数据采集、数据处理、运动重定向、后期优化、输出应用七个核心环节,每个环节直接影响最终数据质量。
4.1 前期准备:项目规划与环境搭建
前期准备是保证捕捉顺利进行的基础,核心工作包括:
1. 需求明确:确定捕捉目标(人体/物体)、动作类型(全身/手指/面部)、精度要求、输出格式、应用场景;
2. 空间规划:根据捕捉范围划定安全区域,清理空间内反光物体、金属干扰物、遮挡物,保证采集设备视野无阻挡;
3. 目标准备:人体捕捉需穿着紧身服装,避免宽松衣物遮挡关节;物体捕捉需固定标记点位置,保证重心稳定;
4. 设备检查:检查相机、传感器、电池、传输信号、软件版本,确保硬件无故障、软件参数正常;
5. 动作设计:规划捕捉动作序列,明确动作起止、衔接节奏、重复次数,提前演练避免采集失误。
4.2 系统标定:空间与设备校准
标定是统一坐标系、消除设备误差的关键步骤,不同技术路线标定方式不同:
4.2.1 光学动捕标定
1. 相机标定:使用专用标定板在捕捉空间内移动拍摄,软件自动计算每台相机的位置、朝向、焦距、畸变参数;
2. 坐标系建立:设定空间原点与坐标轴,确定捕捉区域的三维边界;
3. 时间同步:校准所有相机的采集时间,保证帧序列完全对齐。
4.2.2 惯性动捕标定
1. 姿态标定:目标保持标准站姿(T-pose/A-pose),传感器记录初始姿态,建立骨骼长度与关节关系;
2. 零偏校正:静止状态下采集传感器基线数据,消除加速度计、陀螺仪零偏误差;
3. 磁场校准:在捕捉环境中校正磁力计,降低环境磁场干扰。
4.2.3 无标记动捕标定
1. 相机内参标定:校正单台相机的焦距、畸变;
2. 多目外参标定:确定多台相机之间的相对位置与姿态;
3. 人体模型适配:加载标准人体骨骼模板,匹配目标身高、肢体比例。
标定完成后需进行测试动作验证,确保坐标稳定、无明显偏差,方可进入采集环节。
4.3 数据采集:运动信号实时记录
数据采集是真实动作转化为原始数字信号的过程,核心要求是完整、稳定、无干扰:
1. 人员就位:捕捉对象进入标定空间,佩戴标记点或传感器,保持身体放松,动作符合自然规律;
2. 参数设置:设置采样率(专业场景常用120-240fps)、录制时长、自动保存规则;
3. 实时监控:通过软件实时查看标记点跟踪状态、传感器数据稳定性、动作流畅度,发现异常立即暂停重录;
4. 多组录制:复杂动作建议多次录制,保留备用数据,避免单段数据失效导致项目延误;
5. 数据备份:实时备份原始采集文件,防止断电、故障造成数据丢失。
采集过程中需避免:快速出界、肢体过度遮挡、传感器脱落、强光源直射相机、磁场干扰等问题。
4.4 数据处理:原始信号清洗与解算
原始采集数据包含噪声、缺失、漂移等问题,必须经过处理才能使用,核心步骤包括:
1. 标记点/传感器识别:软件自动匹配标记点ID与传感器位置,关联到对应骨骼关节;
2. 数据补全:对遮挡、信号丢失导致的缺失帧,通过线性插值、曲线拟合、运动预测算法修复轨迹;
3. 噪声滤波:使用高斯滤波、滑动平均、低通滤波等算法,去除高频抖动噪声,保留真实运动细节;
4. 漂移修正:惯性数据通过零速更新、磁场约束、位置约束修正长时间漂移误差;
5. 骨骼解算:将离散的坐标/姿态数据,映射到标准骨骼模型,计算关节旋转角度,生成连续骨骼动画。
数据处理的目标是:轨迹连续、姿态自然、无异常抖动、无生理错误动作。
4.5 运动重定向:跨模型动作适配
运动重定向是将捕捉到的动作,从捕捉对象模型适配到目标虚拟角色的过程,解决不同模型骨骼比例、体型差异问题:
1. 骨骼映射:建立捕捉骨骼与目标角色骨骼的关节对应关系,如肩部、肘部、腕部一一匹配;
2. 比例适配:根据肢体长度比例,调整位移幅度、旋转角度,保证动作符合目标模型体型;
3. 运动约束:添加关节旋转限制,避免目标模型出现不符合生理结构的动作;
4. 质量检查:预览重定向后动作,调整脚步贴合、重心稳定、肢体碰撞等细节。
运动重定向让一套捕捉数据可适配多种虚拟角色,提升数据复用率。
4.6 后期优化:动作细节精修
处理后的数据可通过人工微调提升效果,核心优化内容:
1. 关键帧调整:修正明显错误的关节姿态、脚步滑动、身体偏移;
2. 节奏优化:调整动作快慢、停顿时间,让运动节奏更自然;
3. 细节补充:添加手指微动、肌肉张力、重心变化等细腻效果;
4. 碰撞检测:避免虚拟角色肢体穿模、地面穿透等问题。
4.7 输出应用:标准化数据导出
最终输出行业通用格式,适配不同软件与引擎:
1. 动画格式:BVH、FBX、ABC等,支持主流三维动画软件、游戏引擎;
2. 数据格式:TRC、C3D等,用于生物力学、体育科研、医疗分析;
3. 实时输出:通过SDK直接驱动虚拟人、机械结构,用于直播、交互、仿真。
5.1 遮挡问题与处理
遮挡是光学动捕最常见问题,肢体重叠、道具遮挡会导致标记点丢失。
解决方案:
1. 增加相机数量与覆盖角度,减少视觉盲区;
2. 优化标记点布局,在易遮挡部位增加辅助标记点;
3. 采用算法轨迹预测,自动补全短时间丢失数据;
4. 混合惯性动捕,利用惯性数据补充遮挡时段姿态。
5.2 信号漂移与抑制
漂移是惯性动捕核心问题,长时间采集导致姿态偏差累积。
解决方案:
1. 定期进行姿态重置,回归标准站姿校正;
2. 融合位置约束(如光学定位、视觉定位)修正绝对位置;
3. 优化传感器融合算法,提高姿态解算稳定性;
4. 采用高质量磁力计与加速度计,降低硬件误差。
5.3 软组织运动(皮肤形变)补偿
人体运动时皮肤、肌肉会产生形变,影响标记点/传感器位置精度。
解决方案:
1. 标记点固定在骨骼突出部位,减少皮肤滑动影响;
2. 采用紧身捕捉服,固定传感器与标记点位置;
3. 通过算法建模补偿皮肤形变误差。
5.4 多人动作捕捉干扰
多人同时捕捉易出现标记点混淆、肢体交叉干扰。
解决方案:
1. 主动式标记点使用ID编码,独立识别不同目标;
2. 优化空间布局,保证多人动作区域相对独立;
3. 基于骨骼模型区分不同人体,避免数据串扰。
5.5 实时性与精度平衡
高实时性与高精度存在矛盾,高采样率与复杂算法会增加延迟。
解决方案:
1. 实时场景降低算法复杂度,保证低延迟;
2. 离线制作采用高采样率与精细算法,提升精度;
3. 采用硬件加速与并行计算,平衡实时性与精度。
6.1 影视动画与游戏制作
1. 影视特效:虚拟角色、数字替身、大型场景动作采集,提升画面真实感;
2. 动画制作:快速生成角色动作,缩短制作周期,降低成本;
3. 游戏开发:制作主角、NPC动作库,适配主机、手游、VR游戏。
6.2 虚拟现实与交互娱乐
1. 虚拟直播:实时驱动虚拟人,实现主播与虚拟形象同步互动;
2. VR体验:体感游戏、虚拟社交、沉浸式体验,提升交互自然度;
3. 主题乐园:互动投影、虚拟表演,增强游客参与感。
6.3 体育科研与训练
1. 动作分析:记录运动员跑跳、投掷、击球动作,量化关节角度、发力节奏;
2. 技术优化:对比标准动作与实际动作差异,指导训练改进;
3. 伤病预防:分析运动姿态风险,降低损伤概率。
6.4 医疗康复与仿生
1. 康复评估:记录患者肢体运动范围、步态特征,评估康复效果;
2. 辅助治疗:定制康复动作方案,实时监测训练姿态;
3. 仿生机械:驱动假肢、外骨骼、机器人,模拟人体自然运动。
6.5 工业仿真与科研
1. 工业设计:测试机械结构、车辆、设备运动状态;
2. 机器人研发:采集人体动作,优化机器人运动算法;
3. 生物力学:研究人体、动物运动规律,支撑学术研究。
7.1 技术融合化
单一技术路线向光学+惯性+视觉混合方案发展,结合不同技术优势,兼顾精度、便携性、抗遮挡能力,适应更多复杂场景。
7.2 无标记与轻量化
无标记视觉动捕持续优化精度与稳定性,降低硬件门槛,向消费级设备普及,实现普通相机、手机即可完成动作采集。
7.3 算法智能化
深度学习、AI算法全面渗透动捕流程:自动标定、自动补全、自动重定向、智能优化,减少人工干预,提升处理效率与数据质量。
7.4 实时化与云端化
5G+云端算力支撑远程实时动捕,实现异地采集、云端解算、实时输出,适配远程直播、虚拟协作、云端制作需求。
7.5 采集精细化
从全身动作向面部、手指、肌肉、眼球精细化捕捉延伸,实现微表情、细微动作的数字化还原,提升虚拟形象真实度。
7.6 应用普及化
技术成本下降、操作简化,从专业机构向个人创作者、中小企业普及,成为数字内容创作的基础工具。
结语:
三维动作捕捉作为连接物理世界与数字世界的核心技术,以精准的运动还原能力、高效的生产方式、广泛的场景适配性,持续推动影视、游戏、虚拟交互、体育医疗、工业科研等领域的创新发展。从早期复杂的光学设备,到便携的惯性传感器,再到智能的无标记视觉方案,动作捕捉技术不断降低使用门槛、提升性能表现,让数字运动更贴近真实、让虚拟交互更自然流畅。
理解三维动作捕捉的原理与流程,不仅能够掌握数字内容创作的核心工具,更能把握虚拟世界构建的基础逻辑。随着技术持续迭代与AI深度融合,三维动作捕捉将进一步打破现实与虚拟的边界,为更多行业提供数字化运动能力,成为未来数字生活、数字生产的重要基础设施。



 关注公众号
关注公众号