发布时间:2025-08-07
发布时间:2025-08-07 作者:小编
作者:小编 浏览量:
浏览量:运动捕捉技术正迎来革命性升级,柔性传感与力场融合技术的结合,解决了传统光学、惯性捕捉系统在精度、延迟和适应性上的瓶颈。柔性传感器通过高灵敏度材料实现微应变检测,力场建模则弥补了动态环境下的数据缺失,二者协同将动作捕捉误差控制在亚毫米级。这一突破为医疗康复、体育训练、虚拟现实等领域提供了更可靠的动态姿态分析工具,标志着运动捕捉从“表象记录”迈向“力学本质重构”的新阶段。
当前主流的运动捕捉系统主要依赖光学标记点或惯性测量单元(IMU),但在实际应用中暴露出三大核心问题:
1. 精度与鲁棒性矛盾 光学系统虽能实现毫米级定位,但易受遮挡干扰;IMU设备不受空间限制,却存在累积误差。例如,快速转身动作中,光学标记可能因肢体遮挡丢失数据,而IMU的陀螺仪漂移会导致15°以上的姿态角偏差。
2. 力学信息缺失 现有技术仅能获取关节位置和角度,无法直接测量肌肉发力状态或接触力分布。在康复评估中,患者步态分析缺乏地面反作用力数据,难以区分代偿性动作与真实功能恢复。
3. 动态适应性不足 传统刚性传感器难以贴合人体曲面,在剧烈运动时产生滑动噪声。足球运动员射门时,腿部加速度可达15G,常规设备可能因固定不稳导致数据失真。
材料突破:从“硬”到“软”的范式转换
新型纳米复合材料(如石墨烯/PDMS异质结构)的应变系数可达5000以上,比金属箔传感器灵敏度提升3个数量级。其延展性超过300%,能紧密附着于皮肤表面,在膝关节屈曲等大变形场景下仍保持线性响应。
关键技术突破:
•多模态传感:同步检测压力、形变、温度参数
•自供电设计:摩擦电纳米发电机(TENG)实现能源自给
•超薄封装:厚度<100μm的柔性电路避免运动约束
力场建模:填补力学空白
通过融合有限元分析(FEA)与机器学习算法,构建人体-环境交互力场模型。例如:
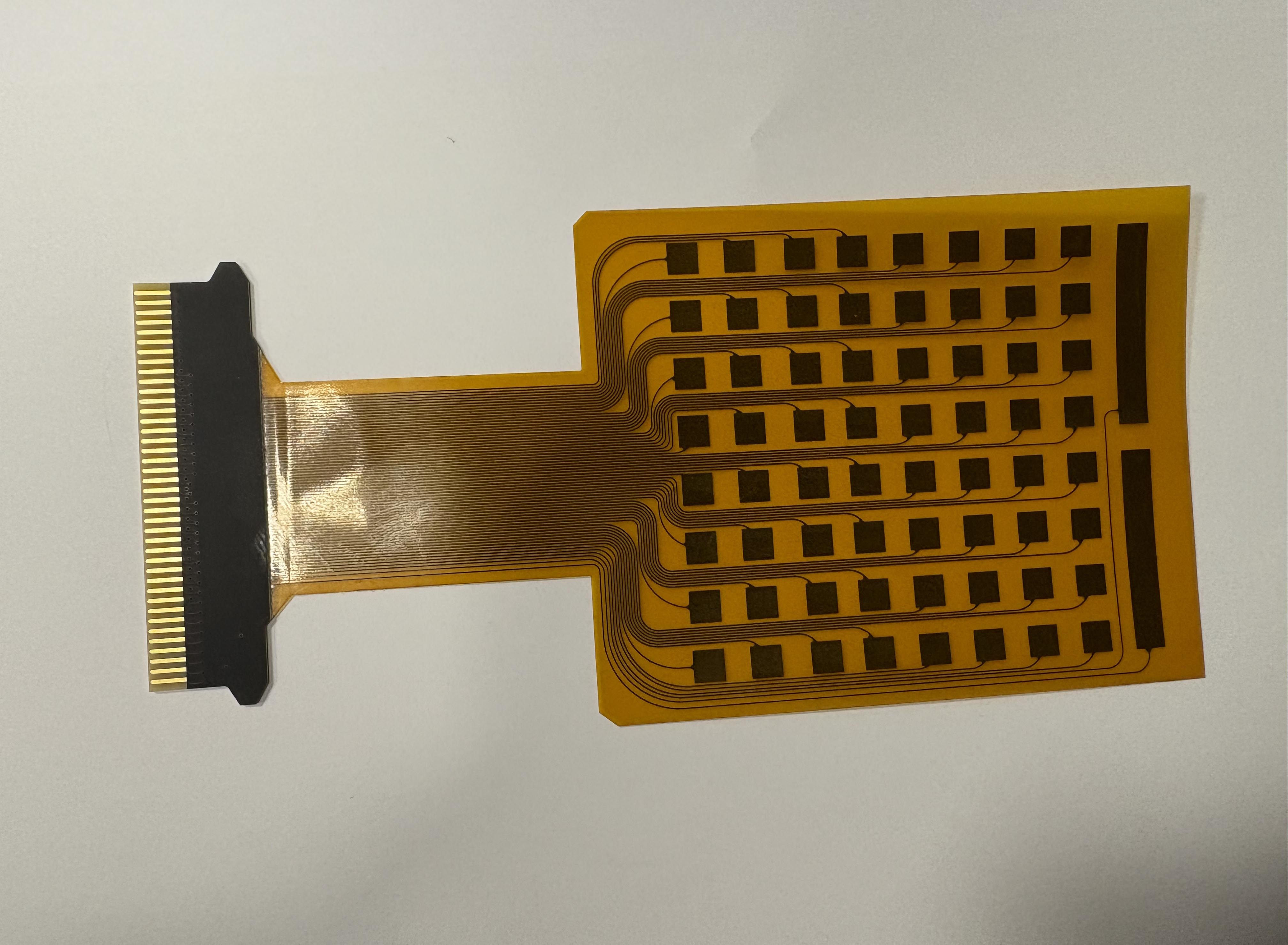
•足底压力分布可通过柔性阵列传感器获取原始数据
•结合生物力学模型推算踝关节力矩误差<2.1%
•动态权重分配算法自动修正运动链误差
数据融合架构
采用三级滤波框架:
1.前端预处理:卡尔曼滤波消除柔性传感器的基线漂移
2.中层配准:ICP算法对齐力场坐标系与运动轨迹
3.后端优化:基于李群理论的姿态估计补偿时间不同步
应用场景验证
•脊柱侧弯矫正:柔性阵列实时监测背部不对称应力,比X光评估效率提升60%
•高尔夫挥杆分析:捕捉腕部微旋转(<1°)与握柄压力分布相关性
•VR力反馈:手部抓取动作的接触力建模误差控制在0.1N以内
尽管取得突破,仍需解决:
1.长期稳定性:柔性材料的蠕变效应可能导致灵敏度衰减
2.多体耦合干扰:上肢运动对下肢力场数据的串扰问题
3.标准化瓶颈:缺乏统一的力学参数评价体系
•可拉伸电子皮肤:实现全表皮覆盖式测量
•量子隧穿传感器:进一步提升微力检测极限
•数字孪生平台:建立个性化生物力学模型库
Q1:柔性传感如何解决传统IMU的漂移问题?
A1:通过光纤光栅等绝对测量原理替代相对积分算法,同时利用力场数据作为约束条件,定期重置累积误差。
Q2:力场建模需要哪些先验知识?
A2:需输入人体骨肌模型参数、组织弹性模量等生物力学特征,通过迁移学习适配不同个体。
Q3:该系统在极端环境(如水下)的适用性?
A3:目前需特殊封装应对液体渗透,未来疏水纳米涂层技术有望实现无障碍水下捕捉。
柔性传感与力场融合技术通过材料创新和算法协同,实现了运动捕捉从几何重建到力学本质的跨越。这一突破不仅提升了数据精度,更开辟了“动作-力学”联合分析的新维度,为精准医疗、竞技体育等领域的量化评估提供了不可替代的技术支撑。随着可穿戴电子与生物力学的深度交叉,人体运动解析将进入“全息化”时代。



 关注公众号
关注公众号