发布时间:2025-08-06
发布时间:2025-08-06 作者:小编
作者:小编 浏览量:
浏览量:随着机器人技术的快速发展,触觉感知能力成为制约机器人精细操作的关键瓶颈。柔性传感器的突破性进展为机器人提供了类皮肤触觉系统,通过高精度多维力场解析技术,实现了对接触力大小、方向、分布的全方位感知。这种技术革新不仅解决了传统刚性传感器在复杂接触场景中的适应性难题,更通过实时力场反馈显著提升了机器人的智能抓取精度和操控灵活性,为工业自动化、医疗手术机器人等领域带来革命性进步。

在当今智能制造和服务机器人蓬勃发展的背景下,机器人触觉感知能力的缺失日益成为制约其性能提升的关键瓶颈。传统工业机器人大多依赖预设程序执行重复性任务,面对复杂多变的真实环境时,缺乏实时触觉反馈导致抓取失败率居高不下。据统计,在非结构化环境中,传统机器人的物体抓取成功率仅为60%-75%,远低于人类95%以上的水平。
触觉感知的复杂性远超视觉和听觉系统。人类手指皮肤分布着约17000个机械感受器,能够同时感知压力、振动、剪切力等多种力学信号,并实时传递给大脑进行综合处理。而传统机器人采用的力/力矩传感器多为单一维度测量,无法解析接触力的空间分布特征,更难以识别滑动、扭曲等复杂接触状态。
环境适应性不足是另一大痛点。刚性传感器在接触柔软或易碎物体时容易造成损伤,而面对不规则表面时又难以实现稳定接触。医疗手术机器人领域尤为突出,外科医生依赖的"组织手感"在机器人系统中长期缺失,严重限制了微创手术的精确度和安全性。
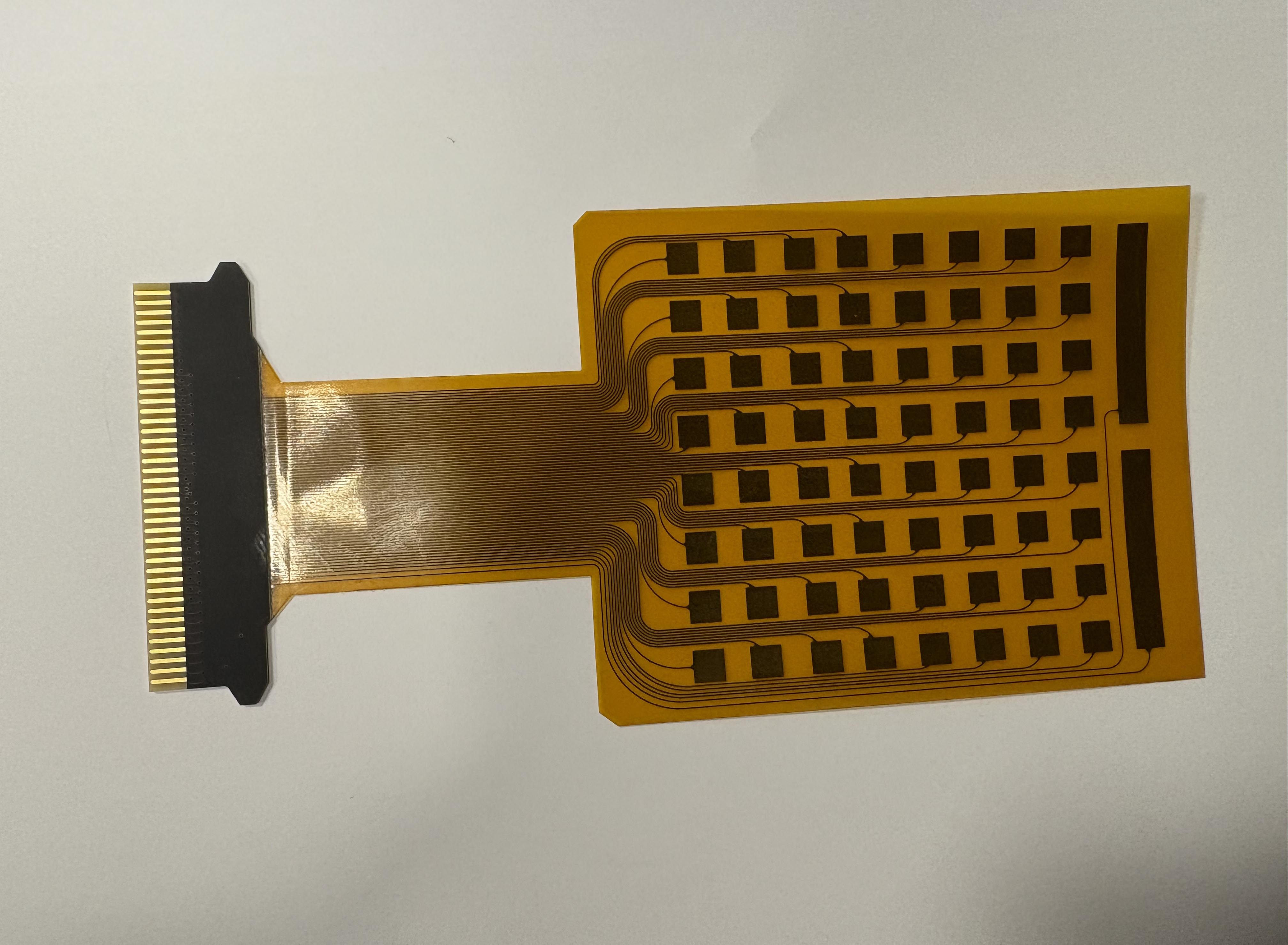
柔性电子技术的突飞猛进为破解机器人触觉难题提供了全新解决方案。不同于传统硅基传感器的刚性结构,柔性传感器采用高分子材料基底与纳米功能材料的复合体系,实现了类似生物皮肤的力学特性与感知功能。
多维力场解析技术是柔性传感器的核心创新。通过在柔性基质中集成高密度传感单元阵列,每个单元可独立测量法向压力和切向剪切力,再通过先进的信号处理算法重建出完整的接触力场分布。最新研究显示,某些柔性触觉传感器的空间分辨率已达到0.5mm,力测量精度优于0.01N,远超人类手指的触觉敏锐度。
材料创新方面,碳纳米管、石墨烯等新型纳米材料的应用大幅提升了传感器的灵敏度与线性度。例如,基于压阻效应的纳米复合材料可实现0.1-10N范围的宽动态力测量,响应时间小于10ms,完全满足实时操控需求。同时,这些材料的可拉伸特性使传感器能够贴合各种复杂曲面,实现类似"电子皮肤"的全覆盖触觉感知。
系统集成层面,柔性传感器与机器人本体的深度融合是关键。现代解决方案采用分布式架构,将信号调理电路与传感单元共同集成在柔性基底上,通过总线网络将数据传送至中央处理器。这种设计既减少了信号传输损耗,又避免了传统布线方式对机器人灵活性的限制。
高精度多维力场解析能力的引入,正在彻底改变机器人的操作范式。通过实时获取接触界面的力学分布特征,机器人系统能够像人类一样"感受"物体的形状、质地和重量分布,实现真正智能化的自适应抓取。
抓取策略优化方面,柔性传感器提供的丰富触觉数据使机器人能够动态调整夹持力和姿态。实验数据显示,配备柔性触觉系统的机器人在抓取未知物体时,成功率提升至92%以上,尤其对易碎物品的损伤率降低了80%。这种能力在食品加工、精密电子组装等领域具有重要价值。
操控精确度的提升同样显著。在模拟缝合手术的测试中,集成柔性触觉反馈的机器人能够准确感知缝线张力变化,将打结力度控制在±0.1N范围内,达到资深外科医生的操作水平。这种精细控制能力也为远程手术的实用化铺平了道路。
人机协作安全是另一大受益领域。传统工业机器人为避免伤人必须设置安全围栏,而具备全向触觉感知的协作机器人能够实时检测意外接触并立即停止,碰撞检测响应时间缩短至5ms以内,使人机并肩作业成为可能。据预测,到2026年,全球协作机器人市场将有70%以上产品集成柔性触觉系统。
尽管柔性触觉技术已取得显著进展,但要完全复制人类触觉的丰富性仍面临诸多挑战。长期可靠性是首要问题,柔性传感器在反复变形下的性能衰减机制需要更深入研究。大规模制造的一致性控制也亟待解决,特别是纳米材料分散均匀性和电极接触稳定性的批量保证。
神经接口可能是下一个突破方向。如何将多维力场信息高效编码为神经电信号,实现与生物神经系统的直接交互,将为脑控假肢和增强现实触觉反馈开辟新途径。初步实验已证明,特定模式的触觉刺激能够唤起大脑对应的体感皮层反应,这为构建真正的"感知-决策"闭环奠定了基础。
边缘智能的发展也将重塑触觉系统架构。随着嵌入式AI芯片性能的提升,未来柔性传感器可能具备本地特征提取和模式识别能力,仅上传关键决策数据而非原始传感数据,大幅降低系统延迟和通信负荷。这种分布式智能更接近生物神经系统的运作方式。
Q1:柔性传感器与传统力传感器的主要区别是什么?
A1:柔性传感器采用可弯曲拉伸的材料基底,能够贴合复杂表面实现分布式测量,而传统传感器多为刚性结构,只能测量单点或有限维度的力信号。柔性传感器还具备更高的环境适应性和安全性。
Q2:多维力场解析如何提升抓取成功率?
A2:通过实时监测接触面的压力分布和剪切力变化,机器人可以准确判断物体的重心位置、滑动趋势和表面特性,从而动态调整夹持力和姿态,避免打滑或过度挤压。
Q3:柔性触觉技术在医疗领域有哪些特殊价值?
A3:在微创手术和远程手术中,柔性传感器能提供精确的组织交互力反馈,帮助医生感知组织硬度、血管搏动等关键信息,大幅提升手术安全性和精确度。
Q4:当前柔性触觉技术面临的主要瓶颈是什么?
A4:包括大规模制造的良率控制、长期使用下的性能稳定性、高密度传感阵列的信号串扰抑制,以及与机器人控制系统的深度集成优化等挑战。
Q5:柔性电子皮肤未来可能具备哪些高级功能?
A5:除了力觉感知,未来可能集成温度、湿度、表面纹理甚至化学物质检测等多元感知能力,实现真正类皮肤的全面感知功能。
柔性传感器技术正在重塑机器人触觉感知的能力边界,通过高精度多维力场解析为智能抓取与操控提供了前所未有的感知基础。这项突破不仅解决了传统刚性传感器在复杂接触场景中的适应性难题,更通过仿生学设计实现了接近人类皮肤的触觉敏锐度。随着材料科学、微纳制造和人工智能的协同进步,柔性触觉技术有望在工业自动化、精准医疗、服务机器人等领域引发连锁创新,最终实现机器人与物理世界交互方式的范式变革。



 关注公众号
关注公众号